@ALL
thanx very much for the appreciation.
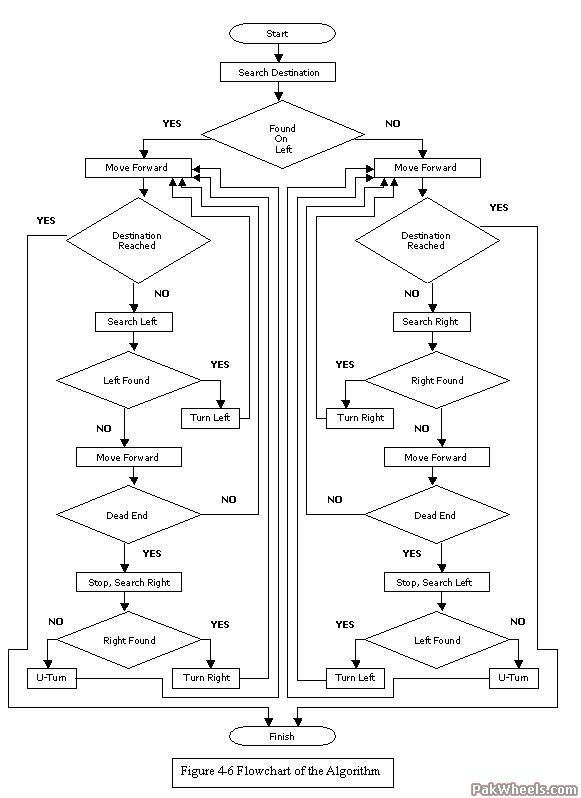
@Fuhrer_Hurricane
Actually i m using left wall following algorithm which gives priority to left walls. It also senses white lines for traction otherwise it will hit the walls, this is done because the robot contained used motors, one of them is faster and one is slower. The sensors i have used are Photoelectric Switches, programming is done on ATmega8L AVR and 89C52 Microcontroller...... Below is the flowchart of the algorithm i have used ....